ゴーヤやオクラやナスなどの夏野菜が美味しい時期ですが、暑さから食欲が落ちる頃でもあります。揚げびたしにして辛めの大根おろしと一緒に頂くとさっぱりしていてたくさん食べられます。そうめんとも合いますし、もちろんお酒とも相性抜群です。水分補給だけではなく、栄養と睡眠も忘れず 暑さを乗り切りたいです。
さて、今回は「お掃除ロボットの比較実験 Part.1」をお届けします。
~ 夏季休業のお知らせ ~
誠に勝手ながら、弊社では下記の期間を夏季休業とさせて頂きます。お客様にはご不便をお掛け致しますが、何卒よろしくお願い致します。
休業期間: 2023年8月11日(金)~2023年8月16日(水)
【1】【CSC検証レポート Part.1】「お掃除ロボットの比較実験」
お掃除ロボット使用時のゴミの舞い上がり・お掃除完了までの清掃時間はどの程度?!
クリーンルームの清掃は必須ですが、今回は少しでも日々の清掃を省力化できないかと考え、一般家庭でも利用されているお掃除ロボットをクリーンルームの前室で使用する状況を想定して検証しました。
3種類のお掃除ロボットを使い3回に渡り検証実験を掲載していきます。
実験内容
初回は下記の2件の検証を実施しました。
- 一般着とクリーン服が混在する前室でお掃除ロボットが稼働中にどの程度ゴミを舞い上げるか?
- 同じエリア内で清掃完了するまでにどの程度の時間を要するか?また、所要時間と清掃状況の相関は?
実験製品
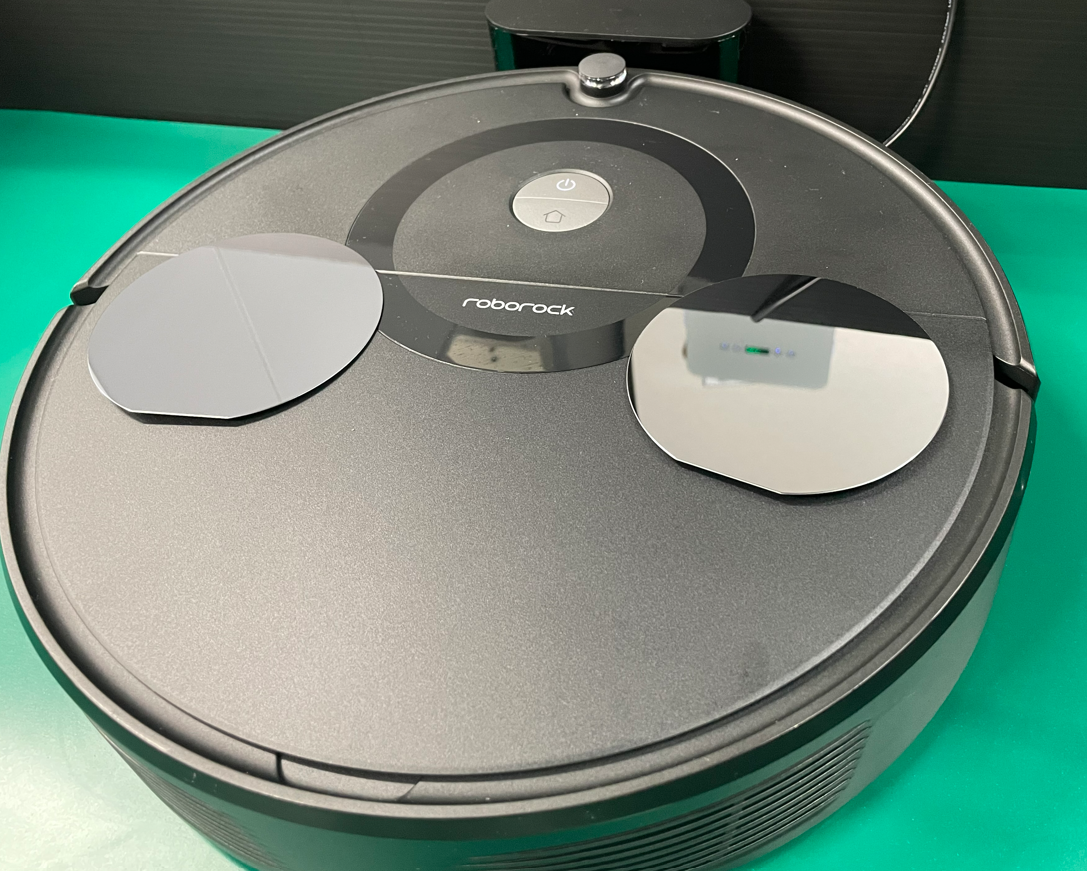
- お掃除ロボットA(吸引+水拭き) 2021年10月製(※新品)
型式:Roborock(スタンダードモデルroborock E5) - お掃除ロボットB(吸引のみ) 2019年 2月製(※使用品;本体清掃+ブラシ・フィルターは新品交換)
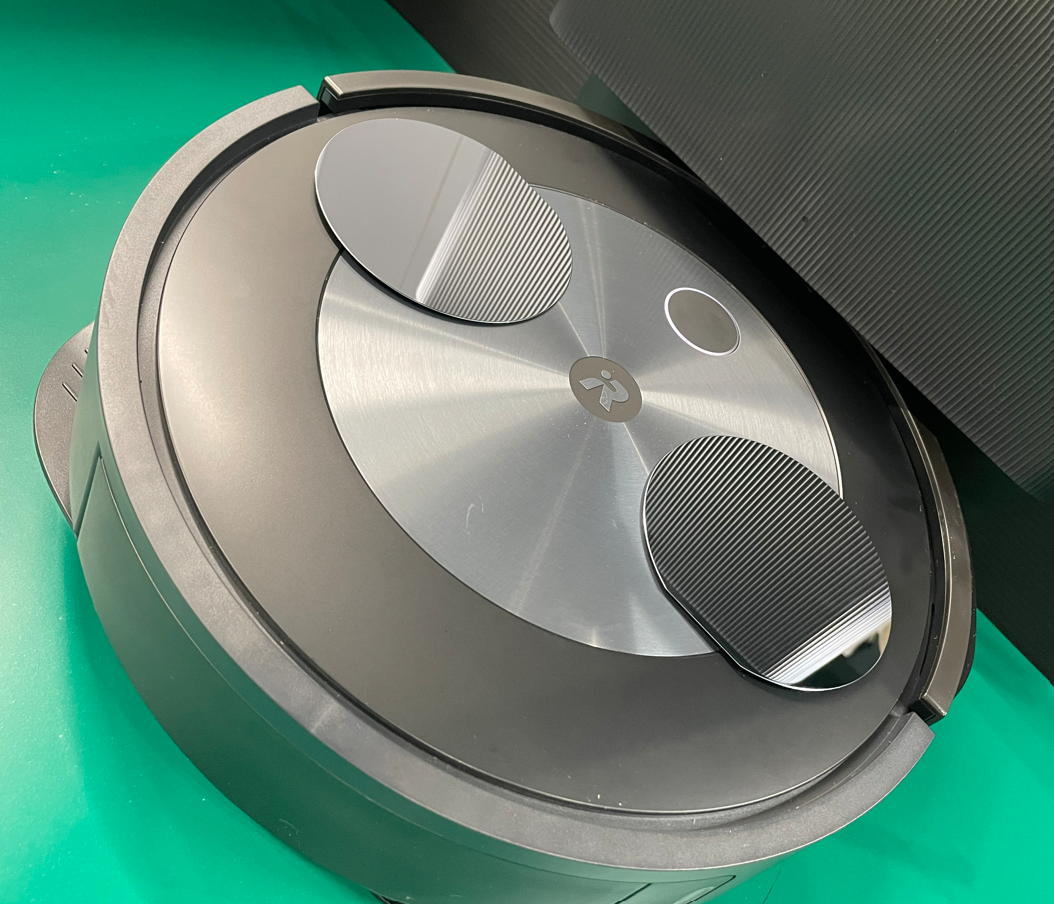
型式:ルンバ(型式:Roomba i7) - お掃除ロボットC(吸引のみ)2022年 2月製(※新品)
型式:ルンバ(型式:Roomba*j7+)

使用機器
- パーティクルカウンタ 型式:KC-51
- 片栗粉
- クリーンルームライトミニN 型式:CSPV-1000-N
- RACCAR 型式:CS-RA004
- シリコンウエハ 型式:CS-Si4
- 疑似床(床面:導電マット/900×1800mm)にプラダンで壁(H300mm)を設置したもの
- 清掃モップ用ウェットワイパー 型式:CS-BT250N3
実験イメージ図
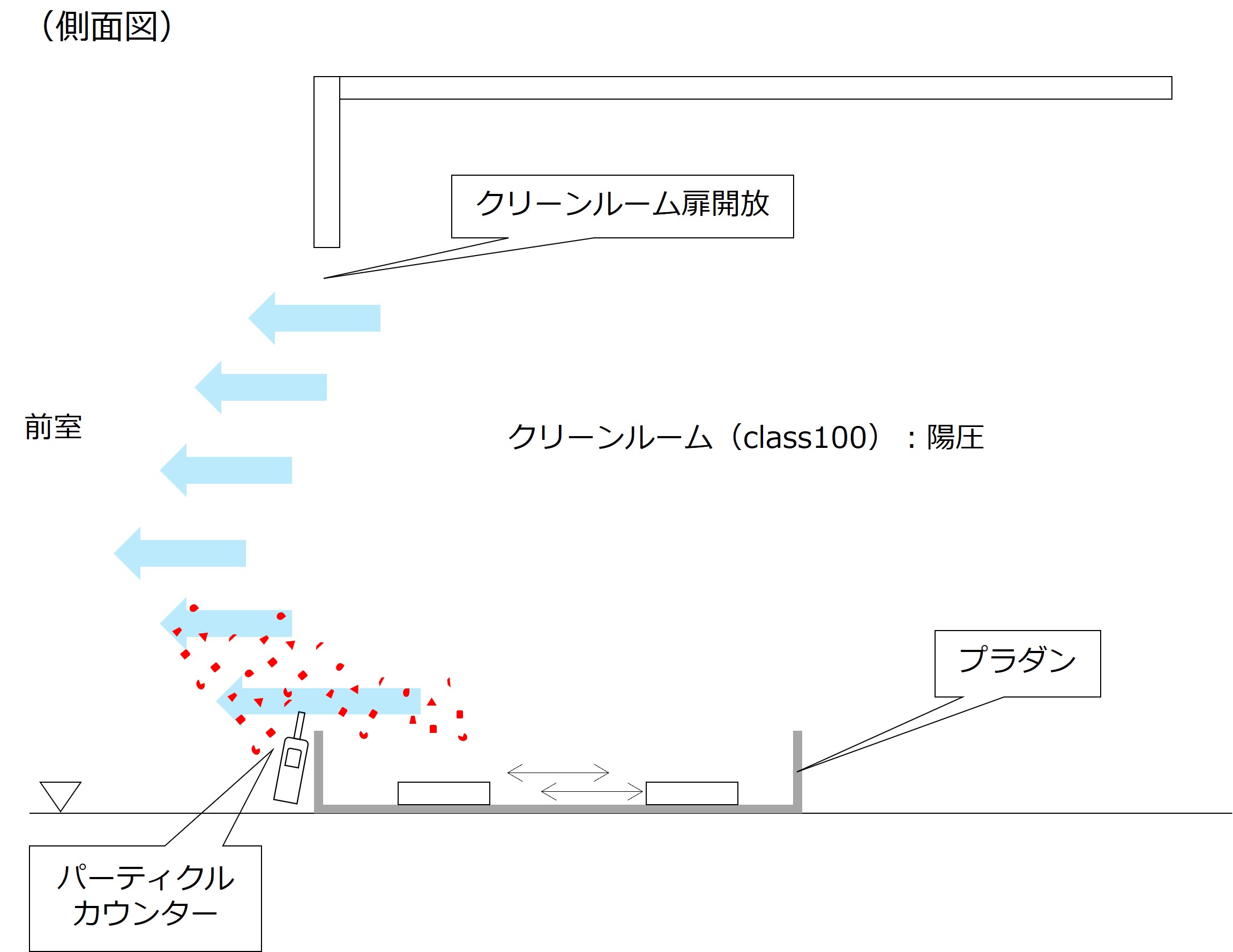
実験方法
- 疑似床(導電マット:900×1800)をウェットワイパーにて
清掃する。 - 1の床面に片栗粉5gを満遍なく撒く。
空間内を落ち着かせるために1分放置。 - パーティクルカウンタを下流側にセット。
(参照:上記実験イメージ図) - お掃除ロボットにて清掃を開始する直前に本体上面に
シリコンウエハを2枚(左右)設置する。 - 実験スタート!パーティクルカウンタとお掃除ロボットを起動
- 清掃完了後に上部ウエハ2枚を取りしてRACCARにて測定する。
- A(吸引)、A(吸引+水拭き)、B(吸引)、C(吸引)の4パターンで実験

実験条件
温度:27.7℃
湿度:59%

実験結果
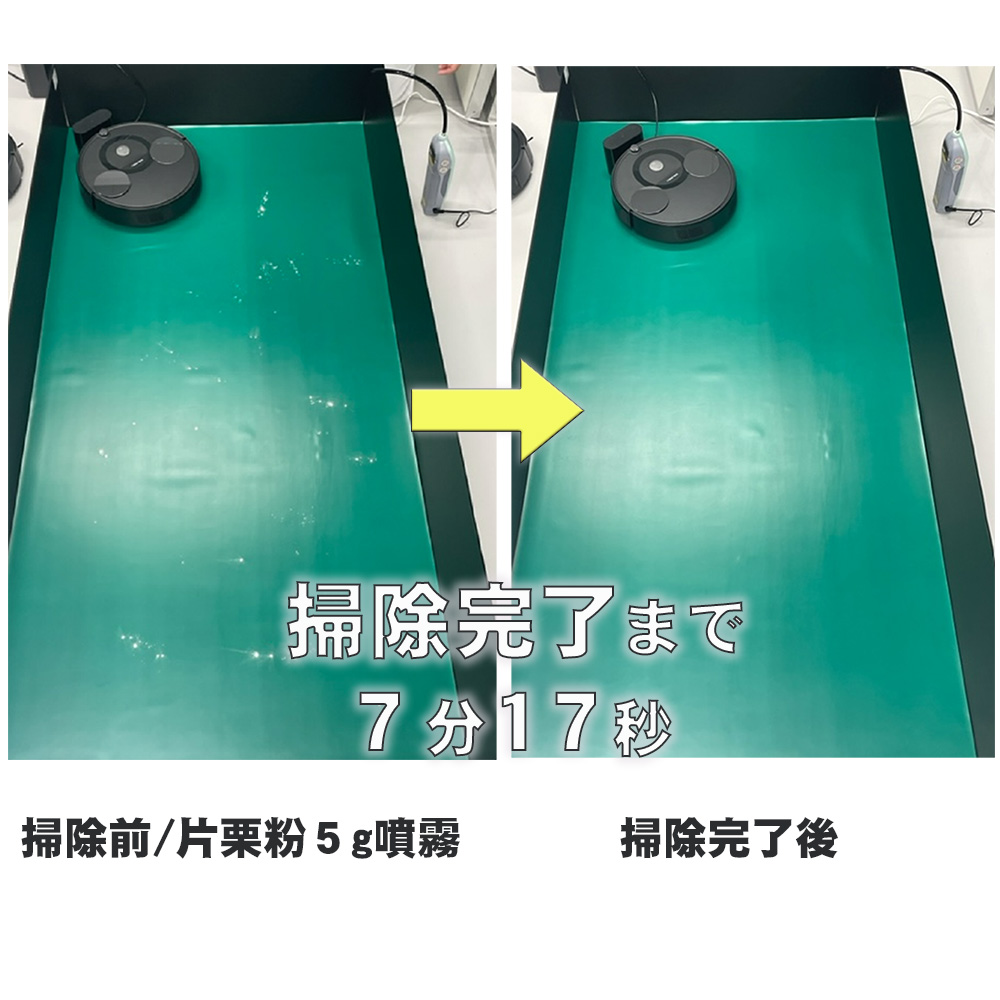
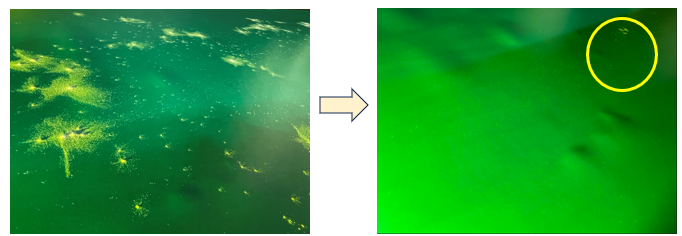
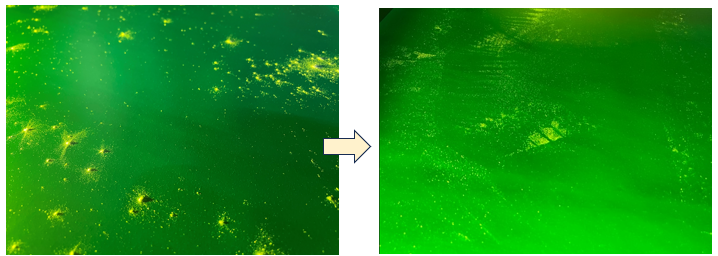
お掃除ロボットA(吸引)
【クリーンルームライトミニNで可視化】
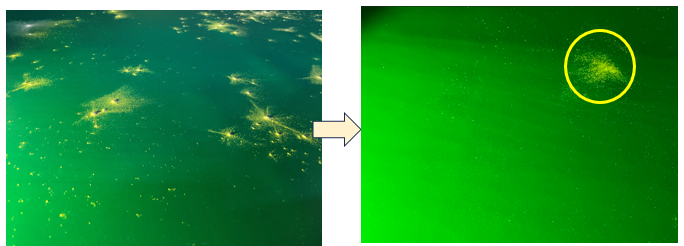
(可視化画像:1)
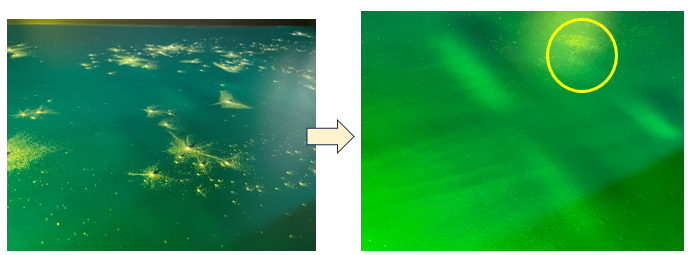
(可視化画像:2)
清掃時間:7分17秒
清掃状況は一見拭き残しなく綺麗な床面になっている様子に見えるが床面に接近して確認すると一部清掃残しが見受けられました。
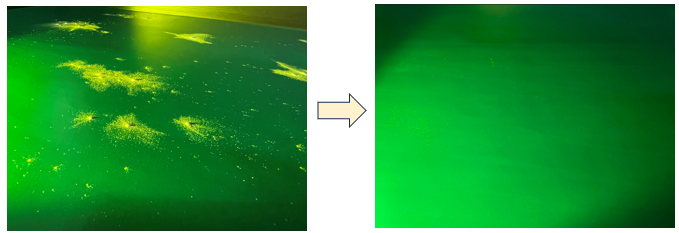
お掃除ロボットA(吸引+水拭き)

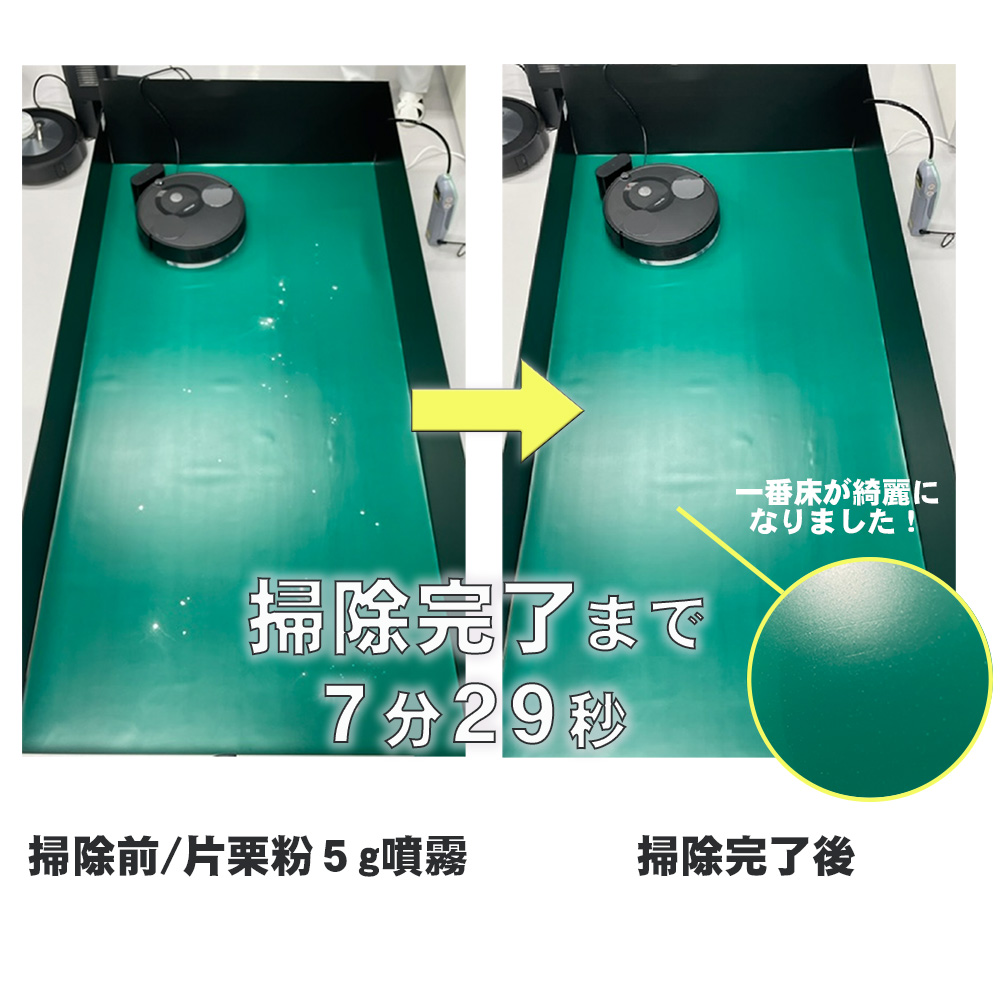
【クリーンルームライトミニNで可視化】
(可視化画像:1)
(可視化画像:2)
清掃時間:7分29秒
清掃状況は写真のとおり、大きな清掃残しはなく清掃完成度は高く、床面を指でなぞってもざらつきの無い状況であった。
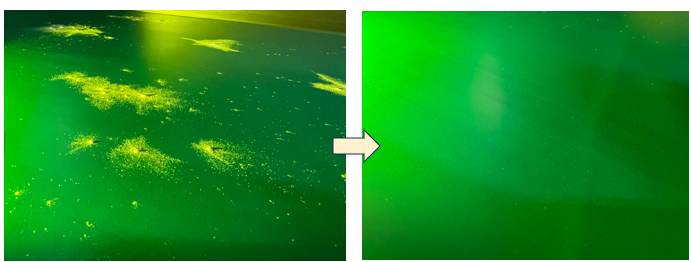
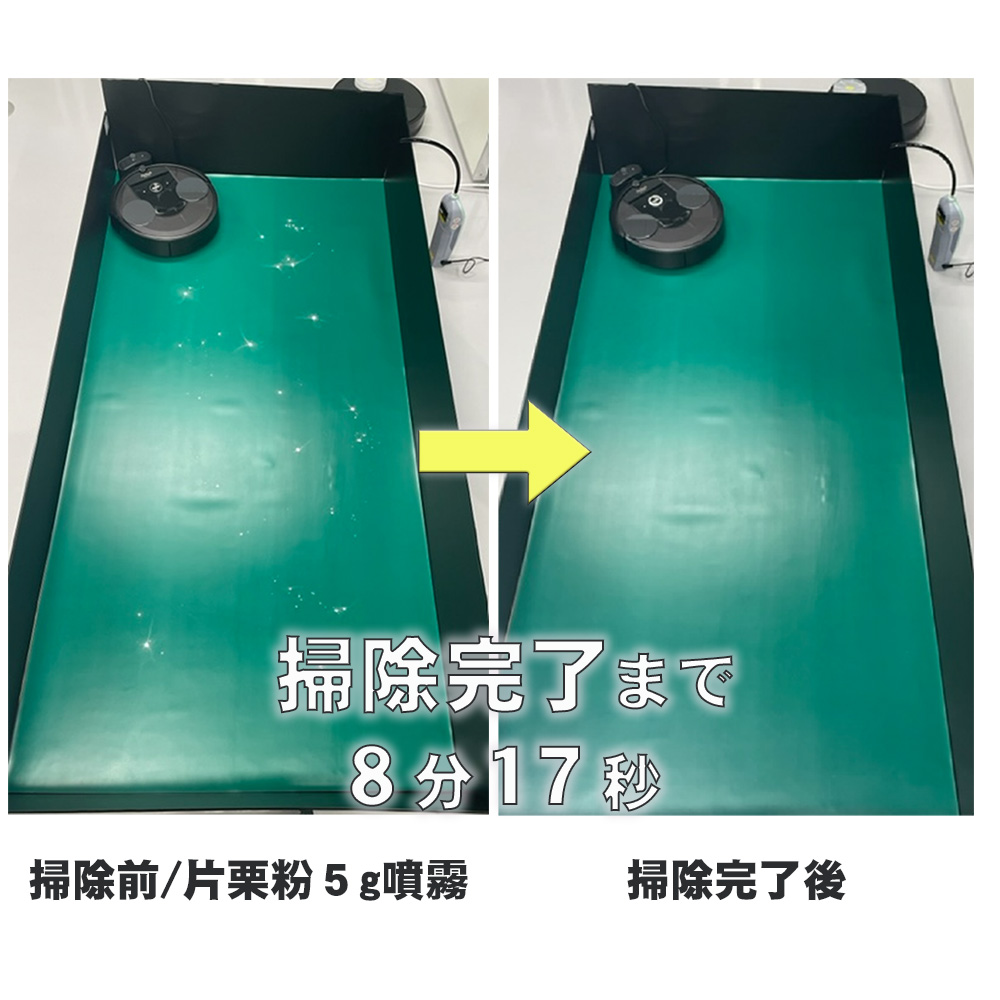
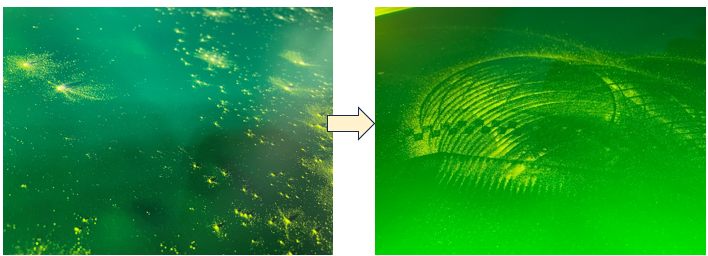
お掃除ロボットB(吸引のみ)

【クリーンルームライトミニNで可視化】
(可視化画像:1)
(可視化画像:2)
清掃時間:8分17秒
清掃状況は写真のとおり、隅々まで清掃され、清掃完成度としては高かったが床面に接近して確認すると、一部清掃残しが見受けられました。
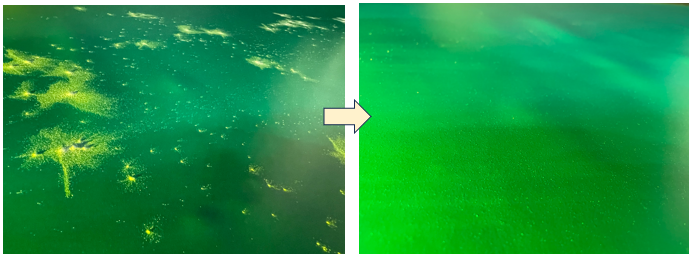
お掃除ロボットC(吸引のみ)
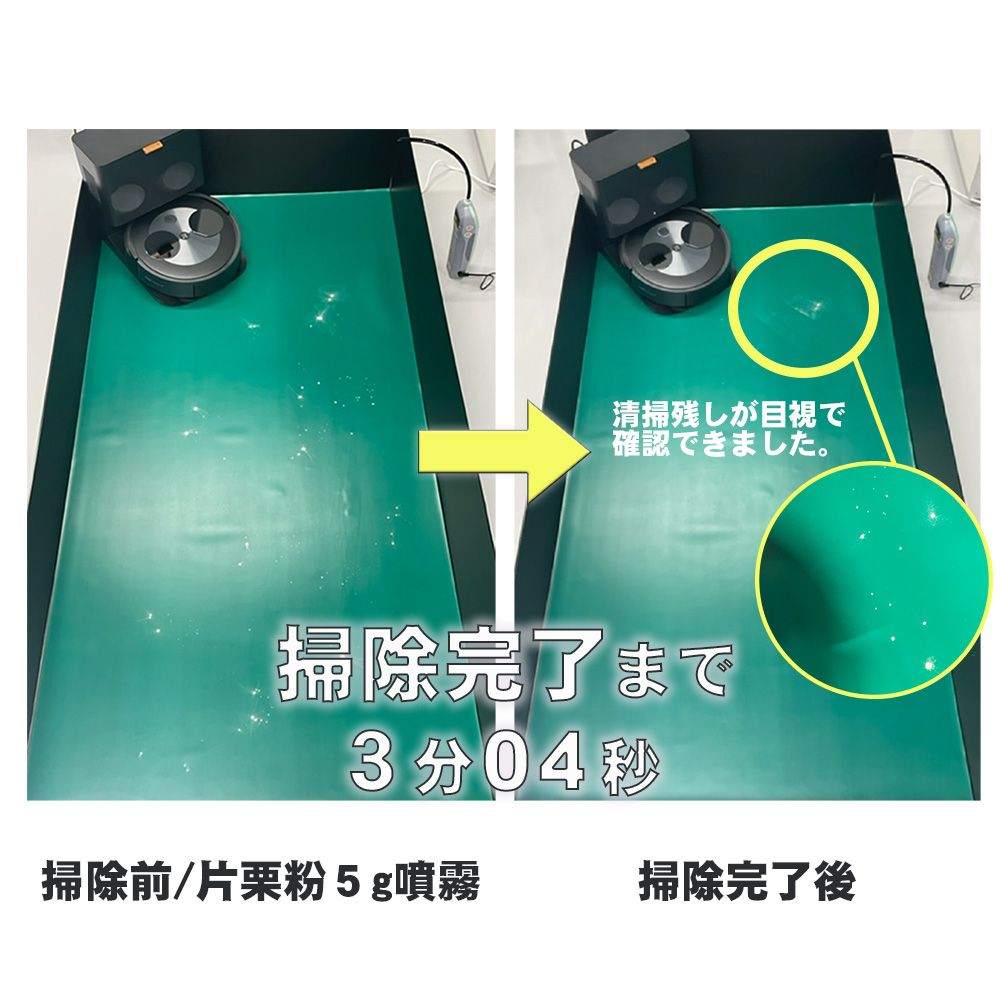
【クリーンルームライトミニNで可視化】
(可視化画像:1)
(可視化画像:2)
清掃時間:3分04秒
清掃状況は他の掃除機と比較して清掃時間が各段に短かったこともあり遠目でも清掃残しが確認されました。タイヤ痕なども残っており、極めて清掃完成度は低い状態でした。
実験数値の結果
実験数字は下記の結果となりました。
結果1 清掃中のパーティクル浮遊量
| A (吸引) | パーティクル数 (個) | ||
|---|---|---|---|
| 0.3㎛ | 0.5㎛ | 5㎛ | |
| 初期値 | 1 | 0 | 0 |
| 1分 | 150 | 80 | 10 |
| 2分 | 50 | 30 | 10 |
| 3分 | 20 | 0 | 0 |
| 4分 | 40 | 0 | 0 |
| 5分 | 0 | 0 | 0 |
| 6分 | 10 | 0 | 0 |
| 7分 | 20 | 0 | 0 |
| ー | ー | ー | ー |
| 合計 | 290 | 110 | 20 |
| A(水拭き) | パーティクル数 (個) | ||
|---|---|---|---|
| 0.3㎛ | 0.5㎛ | 5㎛ | |
| 初期値 | 1 | 0 | 0 |
| 1分 | 230 | 30 | 0 |
| 2分 | 250 | 40 | 0 |
| 3分 | 360 | 50 | 0 |
| 4分 | 180 | 10 | 0 |
| 5分 | 140 | 20 | 0 |
| 6分 | 260 | 40 | 0 |
| 7分 | 100 | 20 | 0 |
| ー | ー | ー | ー |
| 合計 | 1,520 | 210 | 0 |
| B (吸引) | パーティクル数 (個) | ||
|---|---|---|---|
| 0.3㎛ | 0.5㎛ | 5㎛ | |
| 初期値 | 1 | 0 | 0 |
| 1分 | 1,230 | 160 | 40 |
| 2分 | 2,260 | 320 | 40 |
| 3分 | 1,170 | 120 | 10 |
| 4分 | 1,000 | 150 | 0 |
| 5分 | 1,200 | 140 | 0 |
| 6分 | 970 | 150 | 20 |
| 7分 | 490 | 50 | 0 |
| 8分 | 820 | 110 | 40 |
| 合計 | 9,140 | 1,200 | 150 |
| C(吸引) | パーティクル数 (個) | ||
|---|---|---|---|
| 0.3㎛ | 0.5㎛ | 5㎛ | |
| 初期値 | 1 | 0 | 0 |
| 1分 | 1,950 | 490 | 60 |
| 2分 | 1,570 | 300 | 30 |
| 3分 | 780 | 180 | 30 |
| ー | ー | ー | ー |
| ー | ー | ー | ー |
| ー | ー | ー | ー |
| ー | ー | ー | ー |
| ー | ー | ー | ー |
| 合計 | 4,300 | 970 | 120 |
結果2 RACCAR測定データ(1分間当たりの舞い上がり数:総数/稼働分数)
| 個数 (個) | A (吸引) 右 | A (吸引) 左 |
|---|---|---|
| 30um以上 | 40 | 5 |
| 50um以上 | 21 | 2 |
| 100um以上 | 6 | 1 |
| 150um以上 | 0 | 0 |
| 200um以上 | 0 | 0 |
| 個数 (個) | B (吸引) 右 | B (吸引) 左 |
|---|---|---|
| 30um以上 | 53 | 56 |
| 50um以上 | 10 | 11 |
| 100um以上 | 0 | 1 |
| 150um以上 | 0 | 1 |
| 200um以上 | 0 | 0 |
| 個数 (個) | A (吸引+水拭) 右 | A (吸引+水拭) 左 |
|---|---|---|
| 30um以上 | 7 | 6 |
| 50um以上 | 6 | 0 |
| 100um以上 | 1 | 0 |
| 150um以上 | 1 | 0 |
| 200um以上 | 0 | 0 |
| 個数 (個) | C (吸引) 右 | C (吸引) 左 |
|---|---|---|
| 30um以上 | 35 | 40 |
| 50um以上 | 10 | 14 |
| 100um以上 | 4 | 6 |
| 150um以上 | 2 | 3 |
| 200um以上 | 2 | 1 |
考察
シーズシーが床掃除で重要視していることは「清掃しやすい床」であることです。前室で考えると電源コードが床を這っている・靴が床に散乱している・棚下に清掃用具が入らない・クリーンロッカー下に隙間が無い等々が解消されれば今回試験したお掃除ロボットの使用が可能になります。大事なことはお掃除ロボットがスムーズに稼働できる状況を作ることにあります=5Sの徹底にもつながります。
今回の実験の結果ですがお掃除ロボットの機種により程度は異なりますが一定程度は清浄度への影響や舞い上がりが発生していることがわかりました。ただ、悪い点だけを注視するのではなく多少の舞い上がりは生じるが、床に散乱したこれだけの塵埃を捕集したことに使用のメリットもあります。舞い上がりに関してはやや要因が不明な点もありますがB・Cのお掃除ロボットはAのお掃除ロボットに比べ、動作速度がゆっくりでした。 人が清掃する場合と同様に、お掃除ロボットもゆっくり静かに動いているときの方が清浄度の変化が小さく、激しく動いたときは壁面への衝突などプラダンが揺れることもあり清浄度が大きく乱れました。動作速度・静かさは舞い上がり結果にも大きく影響することが実験数値の結果からも見て取れます。また、排気口の場所も影響しているのかもしれません。清浄度に関してはゆっくり清掃する方が良いかもしれませんが前室床面積が広い場合ゆっくり清掃していたら時間がかかるデメリットもあります。
引き続きお掃除ロボットの検証実験は Part.2・Part.3 と続けてまいりますのでお楽しみに。
関連商材

ミニN「CSPV-1000-N」

ウェットワイパー

【2】【CSC NET】~新商品情報~ 異物対策に特化!快適セパレートウエア!

お客様の声から誕生した新商品のご案内です!
クリーンウエアの中でも格段に通気性が高く、優れた吸汗・速乾性がありご好評をいただいているCK生地にセパレートタイプの新型が登場しました!ご要望の多かったカラー「黒」もご用意しております♪二重袖、腰タレ、裾ゴム加工で徹底的にウエア内部からの異物をブロックします!毛髪混入対策にお困りのユーザー様、サンプルのお貸出しもご用意しておりますので是非お試しください♪
セパレートクリーンルーム
ウエア(上衣)

セパレートクリーンルーム
ウエア(下衣)黒

セパレートクリーンルーム
ウエア(下衣)白/青
【3】【無料セミナー開催】
~粗大粒子/微粒子の対策とクリーンルームの管理方法~
一般的な対処法では解決しない問題や、現場の方に直接説明して欲しいなど、お客様のご要望にお応えして、『貴社のためだけの無料セミナー』を開催致します。
開催日時:別途お打ち合わせさせて頂きます。
開催場所:シーズシー株式会社 ラボルーム
兵庫県神戸市中央区八幡通1-1-14 4F
参加可能人数:12名まで

随時お申し込みお待ちしております。
お申込みはこちらまで↓
【4】メルマガ写真館「岡崎神社」@京都府

写真は京都の岡崎神社です。小さな境内にたくさんのうさぎの姿があり、縁結びや安産の願いを叶えてくれるそうです。狛犬がうさぎだったり、鳥居の提灯がうさぎのデザインだったり、絵馬やおみくじもうさぎがモチーフになっていてとても可愛いです。兎年の今年是非訪れてみてください。







